Обычное дифференциальное позиционирование одной базовой станции
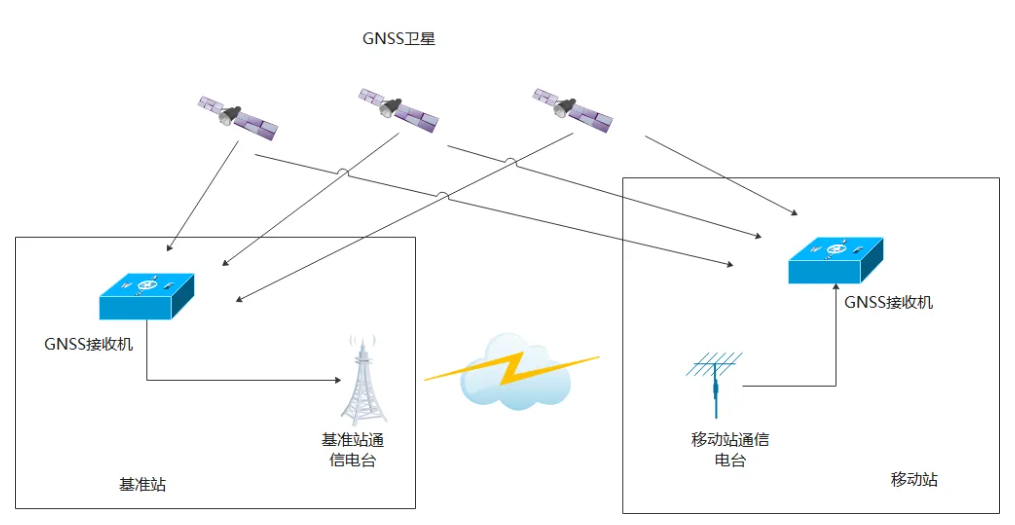
Обычная система дифференциального позиционирования с одной базовой станцией включает в себя два компонента: справочную станцию и мобильную станцию.Как опорная станция, так и мобильная станция оснащены мультисистемными многочастотными спутниковыми приемниками GNSS и станциями связи.Процесс обычного дифференциального позиционирования обычно выглядит следующим образом:
Опорная станция обычно располагается в фиксированном положении на земле, и это положение является точной координатой положения с помощью геометрической съемки.Приемник GNSS на опорной станции принимает спутниковые сигналы GNSS (в настоящее время основная в мире 4-звездочная навигационная система: спутники GPS, Beidou, Galileo и ГЛОНАСС и т.д.) И передает информацию о количестве наблюдений каждого спутника (информация о количестве наблюдений включает номер спутника, псевдодальность, фазу несущей, доплеровский анализ, отношение сигнал/ шум и другую информацию).) Станция связи, которая отправляется на опорную станцию на определенной частоте.
Поскольку опорная станция, как правило, фиксирована, объем спутниковых наблюдений меняется очень незначительно за короткий промежуток времени, поэтому обновление информации о наблюдении и частота передачи опорной станции обычно могут отправляться один раз в секунду.
Станция связи опорной станции передает информацию о наблюдении по беспроводной линии связи.
Если мобильная станция расположена в пределах диапазона действия станции связи опорной станции, станция связи на мобильной станции может принимать информацию наблюдения опорной станции и отправлять информацию наблюдения в приемник GNSS мобильной станции.;
Приемник GNSS в мобильной станции получает информацию наблюдения эталонной станции, использует принцип дифференциального позиционирования, устраняет величину ошибки и определяет местоположение мобильной станции.Благодаря использованию принципа дифференциального позиционирования устраняется часть ошибок, общая для опорной станции и мобильной станции, и значительно повышается точность позиционирования.Если используется разность фаз несущей, точность позиционирования может достигать уровня сантиметров, а если используется разность псевдодальностей, точность позиционирования может достигать около 2 метров.
Из приведенного выше анализа процесса мы можем видеть, что:
Для выполнения высокоточного позиционирования с помощью дифференциальных средств вам необходимо создать свою собственную систему опорных станций.Пользовательскому блоку необходимо приобрести, установить и организовать опорную станцию, и в то же время ему также необходимо настроить персонал по эксплуатации и техническому обслуживанию опорной станции.
Мобильная станция должна находиться в пределах зоны действия станции связи опорной станции.Из-за влияния кривизны земли, вообще говоря, дальность передачи методов передачи "земля-земля" радиостанциями связи составляет от более чем десяти километров до 30 километров, а методы передачи "воздух-земля" могут достигать 100-200 км.Если мобильная станция превышает дальность передачи станции связи опорной станции, опорную станцию необходимо увеличить, чтобы обеспечить полный охват мобильной станции, что приведет к увеличению затрат и увеличению сложности системы.
В области военного применения метод увеличения опорной станции может быть использован для удовлетворения требований к полному дифференциалу мобильной станции, но в областях промышленного использования, гражданского использования и т.д. Метод увеличения опорной станции является более сложным.
Итак, есть ли способ, при котором вам не нужно создавать свою собственную систему опорных станций, и вы можете преодолеть ограничение дальности связи станции связи и выполнить высокоточное дифференциальное позиционирование?
Да, это разница в сети.Пользовательскому устройству требуется приемник GNSS только в качестве мобильной станции для завершения дифференциального позиционирования и получения высокоточных результатов позиционирования.
Основные принципы дифференциации сети CORS
CORS (Непрерывно работающие опорные станции) - это непрерывно работающая сетевая опорная станция, которая отправляет и принимает дифференциальные данные GNSS по сети.После того, как пользователь получает доступ к станции CORS, дифференциальное позиционирование мобильной станции GNSS может быть реализовано без настройки отдельной опорной станции GNSS.
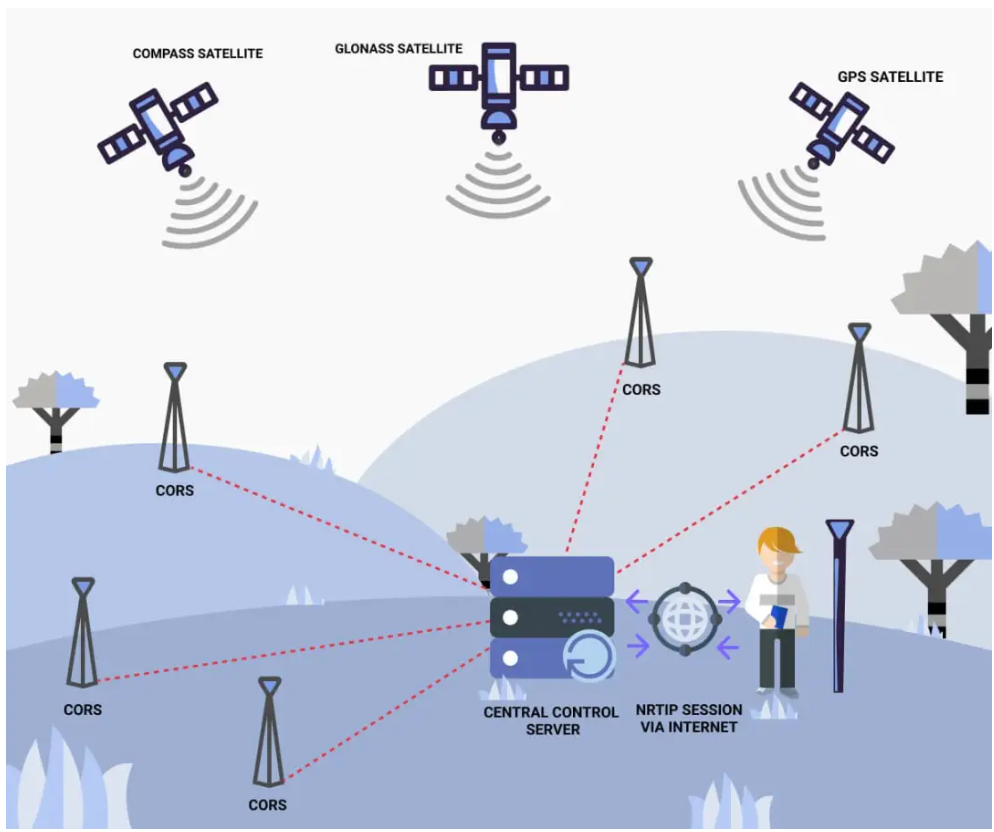
Основная часть сети differential на базе CORS состоит из нескольких опорных станций и центра обработки данных.Несколько опорных станций расположены в определенной области, и опорные станции распределены в виде сетки.Поскольку опорные станции являются стационарными, они могут быть подключены друг к другу через наземный Интернет.
Информация о наблюдениях опорной станции передается в центр обработки данных в режиме реального времени по сети.Центр обработки данных использует точно известное координатное положение опорной станции для моделирования ошибок в ионосфере, потоке, орбите и других ошибок в пределах диапазона сети, генерирует информацию наблюдения, требуемую мобильной станцией, в режиме реального времени и передает эту информацию наблюдения на мобильную станцию в соответствии с определенным форматом данных. Трансляция на мобильную станцию.
После получения информации наблюдения мобильная станция завершает дифференциальное позиционирование, тем самым повышая точность позиционирования GNSS.
Расстояние между наземными контрольными точками обычно определяется в соответствии с конкретными требованиями применения и географическими условиями.Вообще говоря, расстояние между объектами обычно составляет от десяти до нескольких сотен километров, и соотношение между охватом и точностью позиционирования может быть сбалансировано в пределах этого диапазона.Более близкие сайты могут обеспечить более высокую точность, но меньший охват; в то время как более удаленные сайты могут расширить охват, но точность может быть снижена.
Вообще говоря, в городских густонаселенных районах, где требуется высокоточное позиционирование, расстояние между станциями CORS короче, а в сельской местности, пустынях и других районах расстояние между станциями CORS больше.
В практических приложениях расстояние между объектами будет оптимизировано в соответствии с такими факторами, как рельеф местности, характеристики распространения сигнала и потребности пользователя в обеспечении того, чтобы система могла обеспечивать точность позиционирования и покрытие, соответствующие требованиям.
Сетевой дифференциал, основанный на станции CORS, не нуждается в создании собственной опорной станции и может преодолеть ограничение расстояния станции связи. Тогда возникают 2 проблемы.:
Что представляет собой канал связи между центром обработки данных и мобильной станцией?
Каков источник этого наблюдения?
Канал связи в дифференциальной сети
Сеть может использовать сеть мобильной связи (3G, 4G) или наземный Интернет в качестве канала связи, и связь является двусторонней.
Центр обработки данных транслирует информацию о наблюдениях через сети мобильной связи или наземный Интернет;
Мобильная станция отправляет информацию о своем собственном местоположении в центр обработки данных через сеть мобильной связи или наземный Интернет.;
Источник наблюдений в сети дифференциальных
Национальные учреждения, предоставляющие сетевые дифференцированные услуги
Как генерируется информация о наблюдении, требуемая мобильной станцией в дифференциальной сети CORS?
Основной технологией, используемой в настоящее время для дифференциации сетей CORS, является технология виртуальных опорных станций (VRS).Мобильная станция отправляет свои собственные автономные результаты определения местоположения в центр обработки данных по сети.После того, как центр обработки данных получает местоположение мобильной станции, он находит несколько опорных станций рядом с этим местоположением.Информация о данных этих опорных станций используется для моделирования ионосферной задержки и тропосферной задержки определения местоположения мобильной станции, а также вычисляются и генерируются данные наблюдений.Сгенерированные данные наблюдения затем отправляются на мобильную станцию по сети.
Эти данные наблюдения являются данными не реальной опорной станции, а данными “виртуальной” опорной станции, сгенерированной программным обеспечением, и координаты этой опорной станции являются координатами, отправленными мобильной станцией в центр обработки данных.
Поскольку эта координатная точка на самом деле не существует, она вычисляется и является виртуальной, поэтому название этой технологии - Технология виртуальной опорной станции (VRS).
Существует множество отечественных организаций, предоставляющих сетевые дифференцированные услуги, а к частным компаниям, предоставляющим коммерческие услуги, в основном относятся такие компании, как Chihiro и Liufen.Эти компании создали свою собственную систему повышения эффективности CORS station foundation по всей стране и создали свои собственные серверы определения местоположения для предоставления коммерческих услуг определения местоположения внешнему миру.После того, как пользователи зарегистрируют учетную запись и приобретут услуги, они могут войти в систему на сервере определения местоположения и получить данные виртуального наблюдения для differential с сервера определения местоположения в соответствии с протоколом network differential.
Точность сетевого дифференциала
Точность дифференцирования сети зависит от точности данных поставщика дифференцированных услуг.Если организация имеет больше сайтов, более плотный, широкий охват, а алгоритм центра обработки данных относительно совершенен, точность дифференциации сети высока.
Конкретное использование сетевой дифференциации
RTCM32_GGB или RTCM23_GPS.
Сетевой дифференциальный протокол
NTRIP (Сетевая передача RTCM по интернет-протоколу) является одним из основных коммуникационных протоколов системы CORS.NTRIP передает дифференциальные данные GNSS через Интернет, предоставляя пользователям высокоточное решение дифференциального позиционирования в режиме реального времени, которое подходит для различных сценариев применения, требующих высокоточного позиционирования.
Протокол NTrip - это сетевой протокол на основе TCP.
В настоящее время на рынке представлено множество клиентского программного обеспечения, поддерживающего протокол NTRIP. С помощью клиентского программного обеспечения вы можете напрямую войти в систему и получить доступ к серверу определения местоположения коммерческой организации для получения информации о виртуальном наблюдении.;
Зарегистрируйтесь и войдите в систему на сервере определения местоположения
Здесь мы возьмем сервер Тихиро в качестве примера.Зарегистрируйте учетную запись на официальном сайте Chihiro и выберите тип услуги и время использования, необходимые в соответствии с требованиями к точности определения местоположения. после оплаты платформа Chihiro присвоит номер учетной записи и пароль.Затем запишите доменное имя (или IP-адрес), номер порта, точку подключения/источник / mount point и другую информацию о сервере определения местоположения.
Информация о сервере определения местоположения Chihiro выглядит следующим образом:
1) Адрес
Домен name:rtd.ntrip.qxwz.com Или IP (60.205.8.49)
2) Порт
Порт: 8001 соответствует системе координат ITRF2008
Порт: 8002 соответствует WGS84
Порт: 8003 соответствует CGCS2000
3) Точка монтирования/источник/точка монтирования
Войдите на сервер определения местоположения с помощью клиента NTRIPLIENT
Подключитесь к серверу определения местоположения Тихиро.
Если мобильная станция стационарная, вы можете ввести свое приблизительное местоположение в разделе “Мое местоположение” на интерфейсе.;
Если мобильная станция является мобильной, подключите последовательный порт GNSS-приемника мобильной станции к компьютеру, и GNSS-приемник выведет оператор $GGA в протоколе NEMA0183 клиенту NTRIPLIENT, и затем клиент NTRIPLIENT будет непрерывно отправлять местоположение GNSS-приемника на сервер определения местоположения Chihiro с определенной частотой в соответствии с протоколом NTRIP.
Клиентское программное обеспечение NTRIPLIENT получает данные наблюдения VRS, отправленные сервером определения местоположения, анализирует дифференциальный протокол Ntrip и преобразует их в данные дифференциального наблюдения RTCM. Данные наблюдения RTCM могут храниться на диске или выводиться через последовательный порт компьютера.
Через последовательный порт компьютера данные дифференциального наблюдения RTCM непрерывно выводятся на приемник GNSS, и приемник GNSS завершает дифференциальное позиционирование в режиме реального времени.

Если мобильной станции неудобно пользоваться компьютером и она не может запустить клиент NTRIPLIENT, нам необходимо самостоятельно разработать встроенную платформу для реализации функций клиента NTRIPLIENT.В Интернете есть открытый исходный код, который может быть реализован.
Сеть между мобильной станцией и сервером определения местоположения может использовать наземный Интернет или мобильный интернет 4G.